nlopt はCで書かれた非線型最適化ライブラリで、さまざまな言語から使うことができる。 Rのパッケージはnloptr で、nloptは別物である。
インストール
まず、ライブラリをインストールする。 CコンパイラとCMakeが必要。 ソースを展開したら、その中でbuildディレクトリを作り、cmakeを実行し、makeからコンパイル、インストールを指示する。 インストール先として~/.localを指定し、Pythonのインターフェースも構築する例を示す。MacPortsで入れたPython (python313など)をsudo port select python python313してあり、/opt/local/bin/pythonというシンボリックリンクがあることを想定している。 PythonインターフェースはRから使うには不要である。
% cmake .. -DDCMAKE_INSTALL_PREFIX = ${HOME} /.local -DPython_EXECUTABLE = /opt/local/bin/python% make% make installRのインターフェースを構築する際には、pkg-configが用いられるので、確認しておく。 なお、MacPortsのパッケージ名はハイフンのないpkgconfigである。
% pkg-config --libs nloptあとはinstall.packages("nloptr")をRのコンソールで実行してパッケージをインストールするだけである。
制約なし最適化
Vignettes にあるRosenbrock函数の最適化を試してみよう。
library (nloptr)<- function (x) {100 * (x[2 ] - x[1 ] * x[1 ])^ 2 + (1 - x[1 ])^ 2 <- function (x) {c (- 400 * x[1 ] * (x[2 ] - x[1 ] * x[1 ]) - 2 * (1 - x[1 ]), 200 * (x[2 ] - x[1 ] * x[1 ]))<- c (- 1.2 , 1 )<- list ("algorithm" = "NLOPT_LD_LBFGS" , "xtol_rel" = 1.0e-8 )<- nloptr (x0 = x0,eval_f = eval_f,eval_grad_f = eval_grad_f,opts = opts)
Call:
nloptr(x0 = x0, eval_f = eval_f, eval_grad_f = eval_grad_f, opts = opts)
Minimization using NLopt version 2.10.0
NLopt solver status: 1 ( NLOPT_SUCCESS: Generic success return value. )
Number of Iterations....: 56
Termination conditions: xtol_rel: 1e-08
Number of inequality constraints: 0
Number of equality constraints: 0
Optimal value of objective function: 7.35727226897802e-23
Optimal value of controls: 1 1
56ステップで収束した。 コスト函数と勾配の共通部分の計算を節約するために、二つをまとめることもできる。
<- function (x) {<- x[2 ] - x[1 ] * x[1 ]<- 1 - x[1 ]list ("objective" = 100 * f1^ 2 + f2^ 2 ,"gradient" = c (- 400 * x[1 ] * f1 - 2 * f2, 200 * f1))<- nloptr (x0 = x0,eval_f = eval_f_list,opts = opts)
Call:
nloptr(x0 = x0, eval_f = eval_f_list, opts = opts)
Minimization using NLopt version 2.10.0
NLopt solver status: 1 ( NLOPT_SUCCESS: Generic success return value. )
Number of Iterations....: 56
Termination conditions: xtol_rel: 1e-08
Number of inequality constraints: 0
Number of equality constraints: 0
Optimal value of objective function: 7.35727226897802e-23
Optimal value of controls: 1 1
制約あり最適化
次の制約あり最適化問題を考える。
\[
\min_{x \in \mathbb{R}^n}\sqrt{x_2}
\] \[
\begin{aligned}
\text{s.t.}\;x_2 &\ge 0\\
x_2 &\ge (a_1x_1 + b_1)^3\\
x_2 &\ge (a_2x_1 + b_2)^3
\end{aligned}
\]
ここで、\(a_1 = 2,\,b_1 = 0,\,a_2 = -1,\,b_2 = 1\) である。 制約条件は \(g(x)\le 0\) という形に書き換える。
\[
\begin{aligned}
(a_1x_1 + b_1)^3 - x_2 &\le 0\\
(a_2x_1 + b_2)^3 - x_2 &\le 0
\end{aligned}
\]
勾配を用いる制約あり最適化はNLOPT_LD_MMA、NLOPT_LD_CCSAQ、NLOPT_LD_SLSQPが使える。 この中でNLOPT_LD_SLSQPのみ非線型の制約を課すことができる。 マニュアルではNLOPT_LD_CCSAQをまず試すことを勧めている。 この例では、NLOPT_LD_MMAが最も少ない21回で収束した。 NLOPT_LD_CCSAQは24回、NLOPT_LD_SLSQPは43回必要だった。
<- function (x, a, b) {sqrt (x[2 ])<- function (x, a, b) {c (0 , 0.5 / sqrt (x[2 ]))<- function (x, a, b) {* x[1 ] + b)^ 3 - x[2 ]<- function (x, a, b) {rbind (c (3 * a[1 ] * (a[1 ] * x[1 ] + b[1 ])^ 2 , - 1.0 ),c (3 * a[2 ] * (a[2 ] * x[1 ] + b[2 ])^ 2 , - 1.0 ))<- c (2 , - 1 )<- c (0 , 1 )= list ("algorithm" = "NLOPT_LD_MMA" ,"xtol_rel" = 1.0e-8 ,"print_level" = 2 ,"check_derivatives" = TRUE ,"check_derivatives_print" = "errors" <- nloptr (x0 = c (1.234 , 5.678 ),eval_f = eval_f0,eval_grad_f = eval_grad_f0,lb = c (- Inf , 0 ), ub = c (Inf , Inf ),eval_g_ineq = eval_g0,eval_jac_g_ineq = eval_jac_g0,opts = opts, a = a, b = b)
Checking gradients of objective function.
Derivative checker results: 0 error(s) detected.
Checking gradients of inequality constraints.
Derivative checker results: 0 error(s) detected.
iteration: 1
f(x) = 2.382855
g(x) = (9.354647, -5.690813)
iteration: 2
f(x) = 2.356135
g(x) = (-0.122988, -5.549587)
iteration: 3
f(x) = 2.245864
g(x) = (-0.531886, -5.038655)
iteration: 4
f(x) = 2.019102
g(x) = (-3.225103, -3.931195)
iteration: 5
f(x) = 1.740934
g(x) = (-2.676263, -2.761136)
iteration: 6
f(x) = 1.404206
g(x) = (-1.674055, -1.676216)
iteration: 7
f(x) = 1.022295
g(x) = (-0.748790, -0.748792)
iteration: 8
f(x) = 0.685203
g(x) = (-0.173206, -0.173207)
iteration: 9
f(x) = 0.552985
g(x) = (-0.009496, -0.009496)
iteration: 10
f(x) = 0.544354
g(x) = (-0.000025, -0.000025)
iteration: 11
f(x) = 0.544331
g(x) = (0.000000, 0.000000)
iteration: 12
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 13
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 14
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 15
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 16
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 17
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 18
f(x) = 0.544331
g(x) = (-0.000000, 0.000000)
iteration: 19
f(x) = 0.544331
g(x) = (0.000000, 0.000000)
iteration: 20
f(x) = 0.544331
g(x) = (-0.000000, -0.000000)
iteration: 21
f(x) = 0.544331
g(x) = (0.000000, 0.000000)
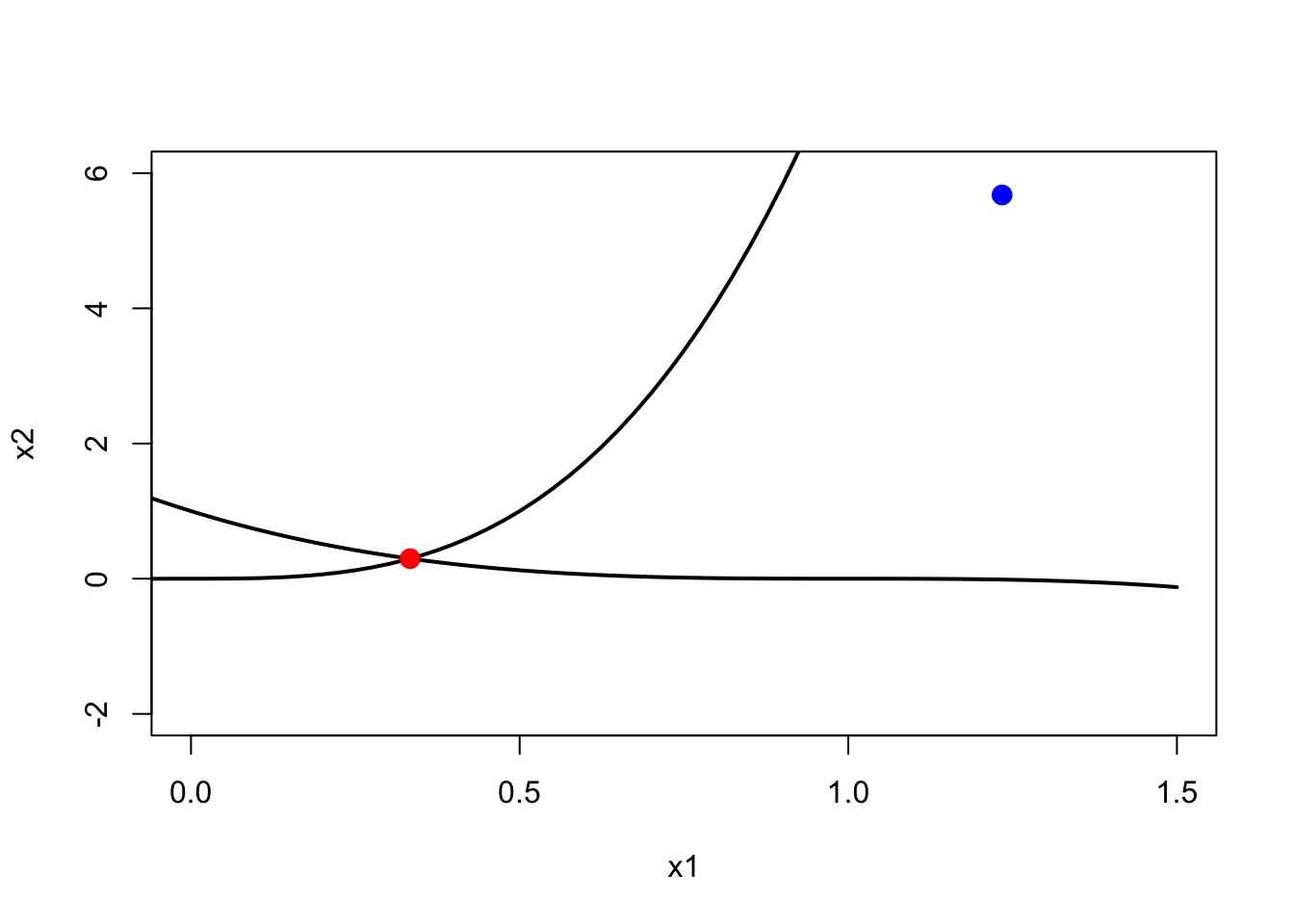
<- seq (- 1 , 1.5 , length.out = 101 )plot (x1, (a[1 ] * x1 + b[1 ])^ 3 , type = "l" , lwd = 2 ,xlim = c (0 , 1.5 ), ylim = c (- 2 , 6 ),xlab = "x1" , ylab = "x2" )lines (x1, (a[2 ] * x1 + b[2 ])^ 3 , lwd = 2 )points (res0$ x0[1 ], res0$ x0[2 ], cex = 1.5 , pch = 16 , col = "blue" )points (res0$ solution[1 ], res0$ solution[2 ], cex = 1.5 , pch = 16 , col = "red" )